 OGURA CLUTCH
OGURA CLUTCH Ogura Industrial Corporation (アメリカ)
Ogura Industrial Corporation (アメリカ) Ogura S.A.S. (フランス)
Ogura S.A.S. (フランス) 小倉離合機 有限公司【中文(簡体)】
小倉離合機 有限公司【中文(簡体)】

把持力:15~350 N
- 独自技術の把持力センサー搭載で、業界トップレベルの広範囲把持力設定が可能
(把持力制御範囲:定格把持力の20%~100%) - 爪はユーザー様でご用意いただくか、当社にお問い合わせください
- セルフロック機構で、停電時のワーク落下を防止
- 全長短縮設計でロボット各関節駆動部への負荷を軽減
- 任意原点設定機能で、タクトタイムを短縮
- 防塵・防水性:IP51(オプションIP54)
- Plug & Play 対応メーカー拡大中
| ラインナップ | |||
|---|---|---|---|
| 型番 | OGR2130 | OGR3350 | OGR2015 |
| 方式 | 電動二爪 | 電動三爪 | 電動二爪 |
| 電源 | DC24V | DC24V | DC24V |
| 消費電力 | 19.2W | 19.2W | 19.2W |
| 把持力 | 130N | 350N | 15N |
| 開閉速度 | 150mm/s | 100mm/s | 100mm/s |
| ストローク | 60mm | 40mm | 40mm |
| 製品質量 | 1.5kg | 2.5kg | 0.4kg |
| 取付規格 | JIS B 8436 番号4 | JIS B 8436 番号4 | JIS B 8436 番号4 |
| OGR3350・OGR2015:開発中のため予告なく変更する場合があります | |||
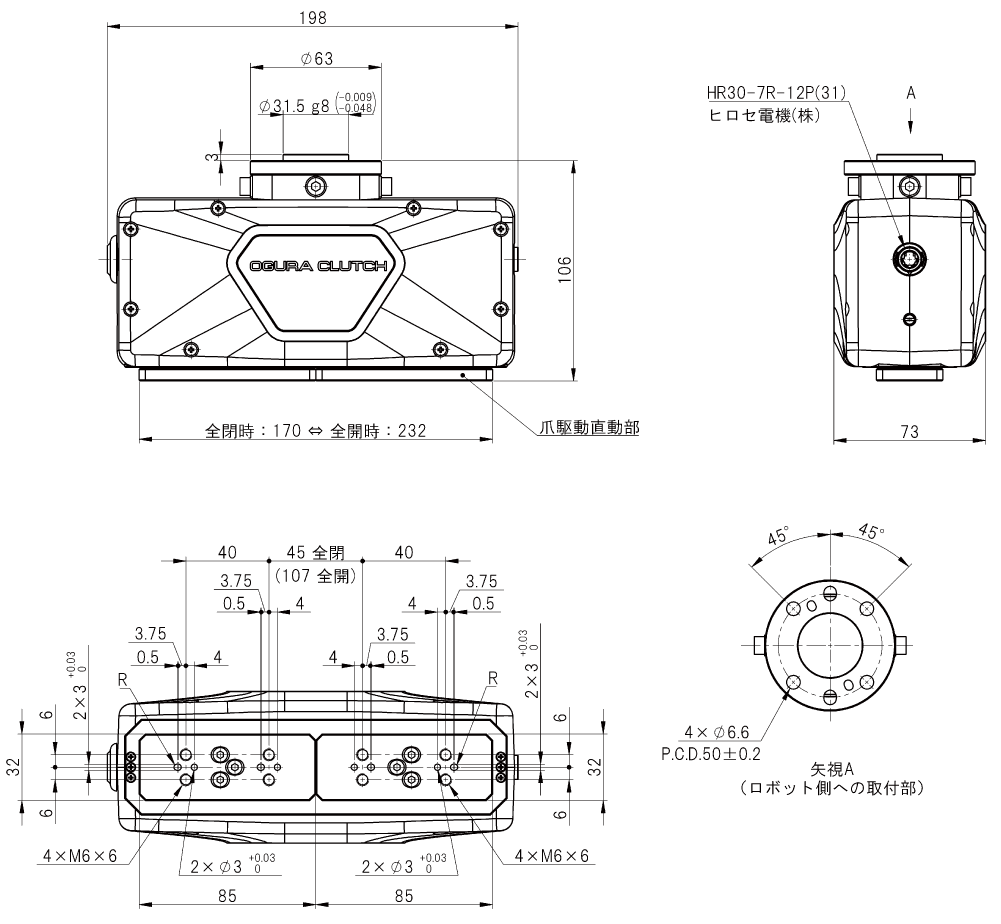
寸法図
OGR2130
ログイン
小倉製品をご愛用のお客様、小倉クラッチにご興味のあるお客様を対象に、会員限定サービスと、お客様とメーカーとのコミュニケーションの場を提供します。
旧ホームページにおけるログイン情報は使用できません。誠に恐れ入りますが、新規登録をお願いいたします。ログイン後各型式の製品ページで以下のサービスを提供いたします
ロボットハンド用ソフトウェアダウンロード
ロボットメーカーのソフトウェアを提供
取扱説明書ダウンロード
一般産業用クラッチ・ブレーキ、ロボットハンドの取扱説明書PDFを提供
CADデータダウンロード
一般産業用クラッチ・ブレーキ、ロボットハンドのCADデータを提供(2DはDXF形式、3DはSTEP形式)
※CADデータダウンロードには、一部掲載されてない型式があります。掲載型式については、予め「型式一覧」ページでご確認ください

oguraclutch.co.jpからのメール受信を許可する設定をお願いします
